用于机器人协会新手引导的循迹小车编程思路
基于机器人创新协会的第四代机器人控制器,提供了引导初次接触类似循迹小车这类软硬件协同复杂设计任务的编程思路和设计思维。包含物理环境分析、传感器、电机、程序架构、编程思路。
|
16,177
|
|
|
11735 字
|
44 分钟
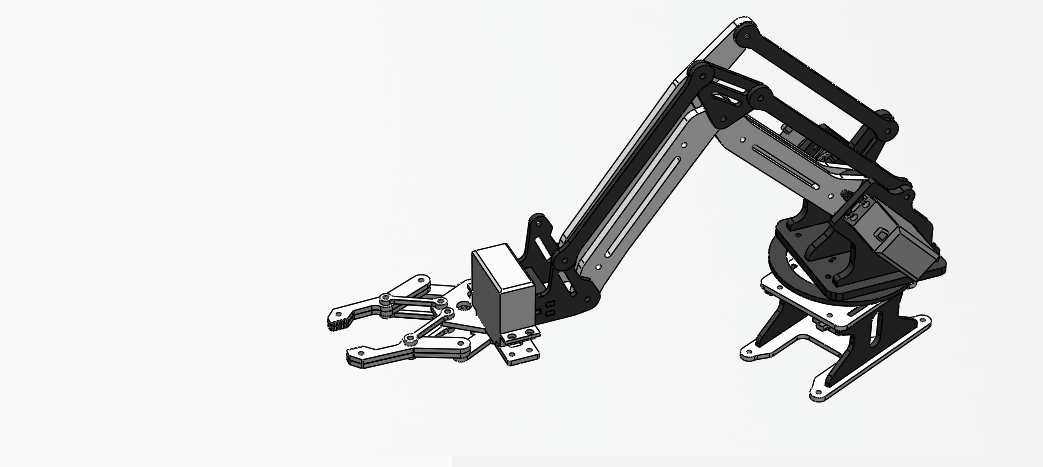
简单四自由度机械臂的正逆向运动学求解及单片机实现
机械臂运动学求解概述 应用场景即其目的 在机器人设计及其控制中,往往认为机器人主要由三种组件构成,即感知器件、执行器件和智能器件。而机械臂作为执行器件中非常重要的一种给机器人提供了更具灵活性的改造世界…
|
148,394
|
|
|
8101 字
|
32 分钟
手工蚀刻的暴力美学——记第零点五次制作电路板
序言 这个博客是从去年年末开始搞的,也就是大一刚入学那会儿。 结果发现自己果然还是靠着一股喜新厌旧的新鲜劲在坚持。结果,也就大一上半学年的那段时间发了一些、记录了一些,后面就一直丢在一旁了。本来说好的…
|
23,513
|
|
|
1941 字
|
8 分钟
启程:智能循迹小车
在之前 该文章内容已经过时(写的较早,且经验不足),不推荐使用文章内的代码,否则可能导致难以预料的错误和后果。建议阅读:《用于机器人协会新手引导的循迹小车编程思路》 注意:该篇文章已经过时,存在一些错…
|
10,548
|
|
|
4735 字
|
39 分钟